
En el marco de los proyectos MATEMAD (https://proyectomatemad.ietcc.csic.es/) y BUILDSPACE (https://www.buildspaceproject.eu/) se ha desarrollado una malla de calibración para cámaras duales (cámara RGB y térmica) con el objetivo de eliminar las distorsiones producidas por la lente y optimizar la planificación de vuelos y el procesado de los datos obtenidos.
El proyecto MATEMAD se llevan a cabo vuelos dron para estudiar el comportamiento de los materiales actuales en los casos de estudio y caracterizar las propiedades termo-ópticas de los materiales, que definen prioritariamente su impacto sobre el entorno urbano y sobre el bienestar de los ciudadanos, pero también otras propiedades relacionadas con el comportamiento y la vida útil en su aplicación en la ciudad. Esta aproximación permitirá identificar los materiales potencialmente útiles para la optimización del entorno urbano y obtener resultados más fiables de las simulaciones realizadas con modelos digitales.
En el proyecto BUILDSPACE los vuelos dron tienen un papel primordial en el desarrollo de algunas tareas. Mediante las imágenes obtenidas de los vuelos se obtiene la nube de puntos 3D que define la envolvente exterior de los edificios de los casos de estudio, para así poder generar la geometría del gemelo digital. Por otro lado, los drones se encuentran equipados con cámaras RGB e infrarrojas, esta información será parte del enriquecimiento que se aportará al gemelo digital; y estas imágenes permitirán, con ayuda de inteligencia artificial, detectar la calidad de la envolvente (puentes térmicos, humedades, grietas, etc.)
Para generar un modelo 3D por medio de imágenes 2D (fotogrametría) es necesario calibrar las cámaras para obtener los parámetros intrínsecos y extrínsecos de estas. Está calibración se realiza debido a que la lente de la cámara cuenta con cierta distorsión, y se distorsiona la realidad capturada. Cuando generamos un modelo mediante imágenes, hemos de tener en cuenta esta distorsión para generar un modelo fiel a la realidad.
En estos proyectos contamos con drones con cámara dual, capturan imagen infrarroja y RGB simultáneamente. Ambas cámaras tienen posiciones, parámetros y resoluciones diferentes, por lo que han de ser calibradas simultáneamente. Esto es un reto para la fabricación de la malla de calibración, ya que debe ser observada tanto en imagen visible como térmica.
Se desarrollaron dos versiones de la malla, la primera en la que se probaron distintos materiales para elegir los que mejor se comportaban en distintas situaciones específicas; y la segunda, la malla definitiva, que se utilizó para calibrar el dron.
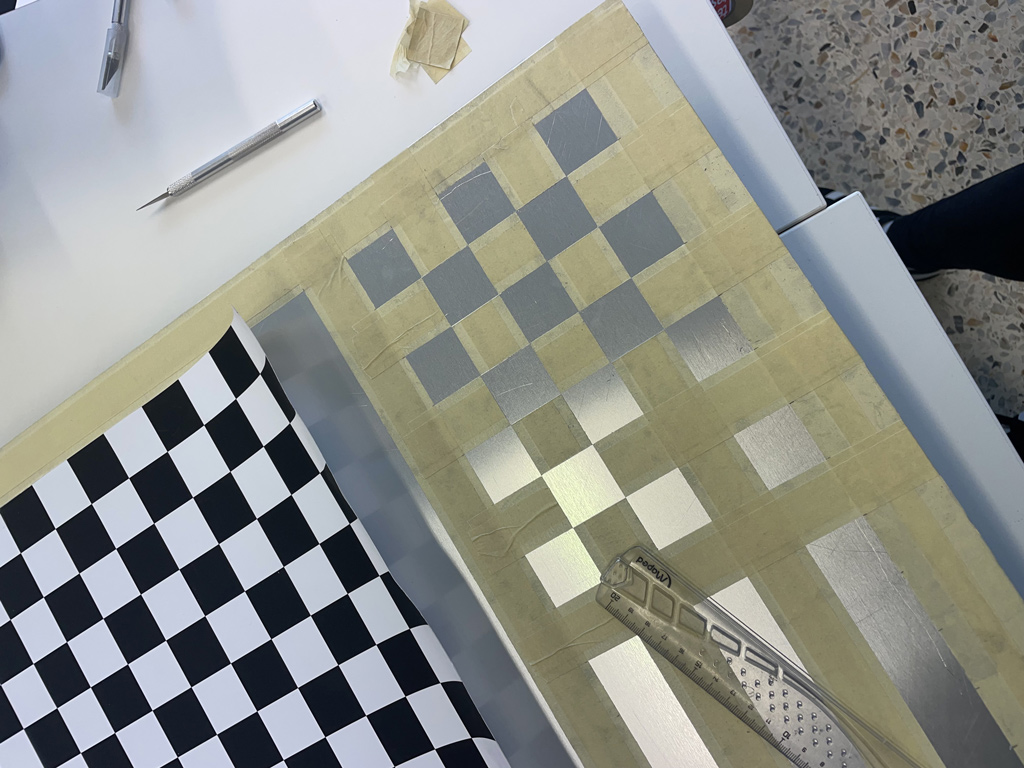
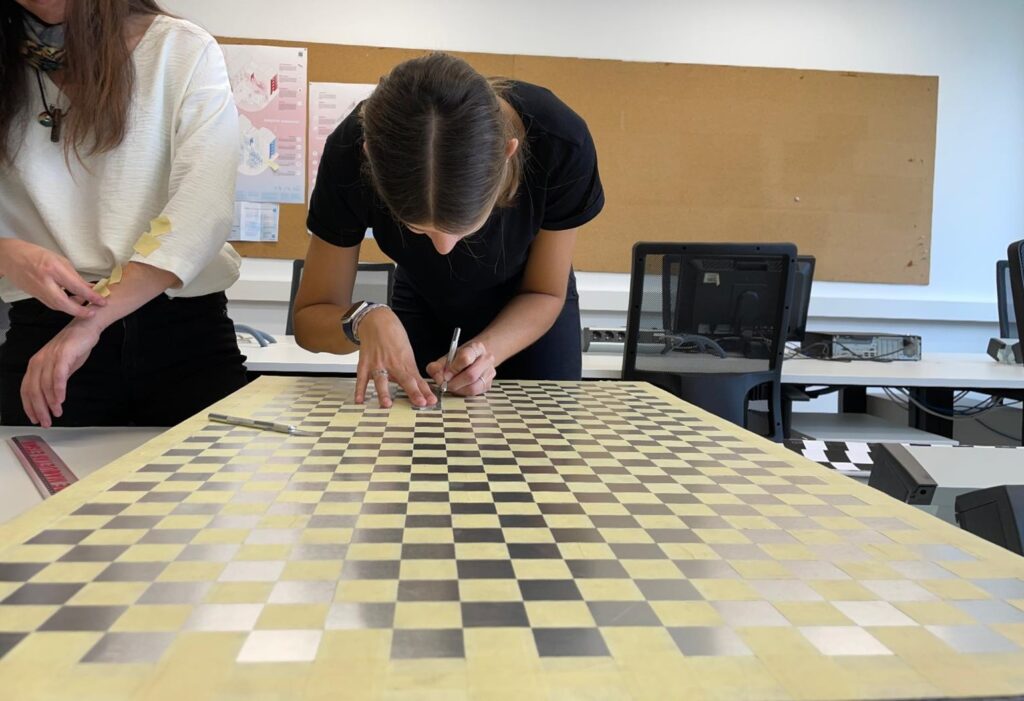
Imagen 1. Proceso de fabricación de malla
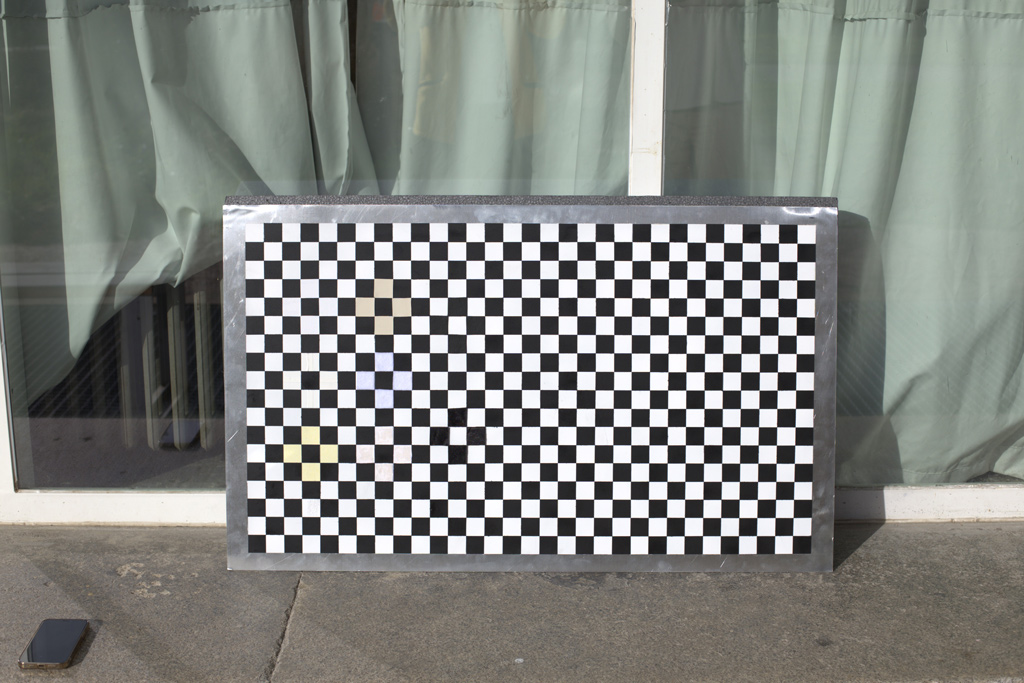

Imagen 2. Medición de materiales con cámara termográfica de mano

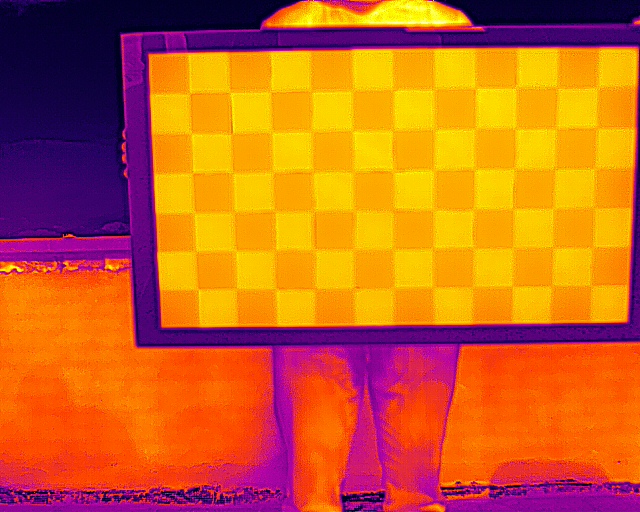
Imagen 3. Resultados de la primera calibración (RGB y térmico)
Conclusiones
La calibración de la cámara era necesaria para la generación del modelo 3D, también nos ha permitido reducir los tiempos de vuelo y procesado de imágenes.
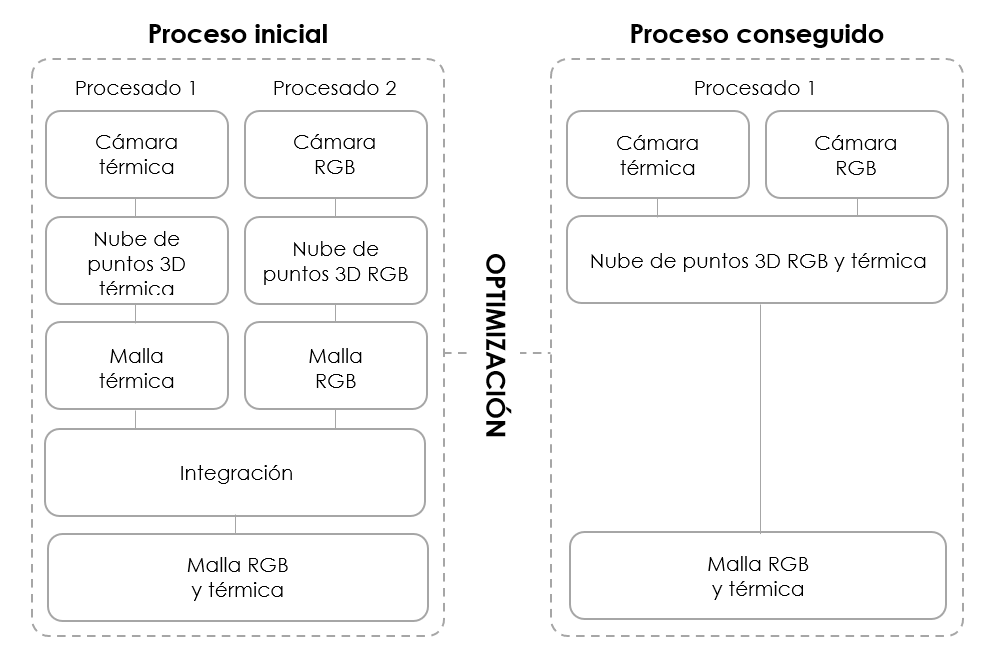
El proceso original constaba de dos procesados de datos, uno para térmico y otro para RGB, pero con la calibración conseguimos reducirlo a un único procesado con ambas imágenes. Por otro lado, en el vuelo dron, la planificación ya no debe tener un solape de imágenes del 85%, con el trabajo realizado, conseguimos reducirlo al 50%. Esto se traduce en menos fotografías por vuelo, reducción de la trayectoria del dron y reducción de tiempos.
Diagrama 1. Optimización del procesado de vuelos
Autores:
- Raquel Burgos Bayo (ETSAM)
- Luis Javier Sánchez Aparicio (ETSAM)
- Serafín López Cuervo Medina (ETSITGC)
- Julián Aguirre de Mata (ETSITGC)
- Patricia San Nicolás Vargas (ETSAM)
- Pablo Sanz Honrado (ETSAM)
- Rubén Santamaría Maestro (ETSAM)
E-mail de contacto: r.burgos@upm.es
